Robotic Automation
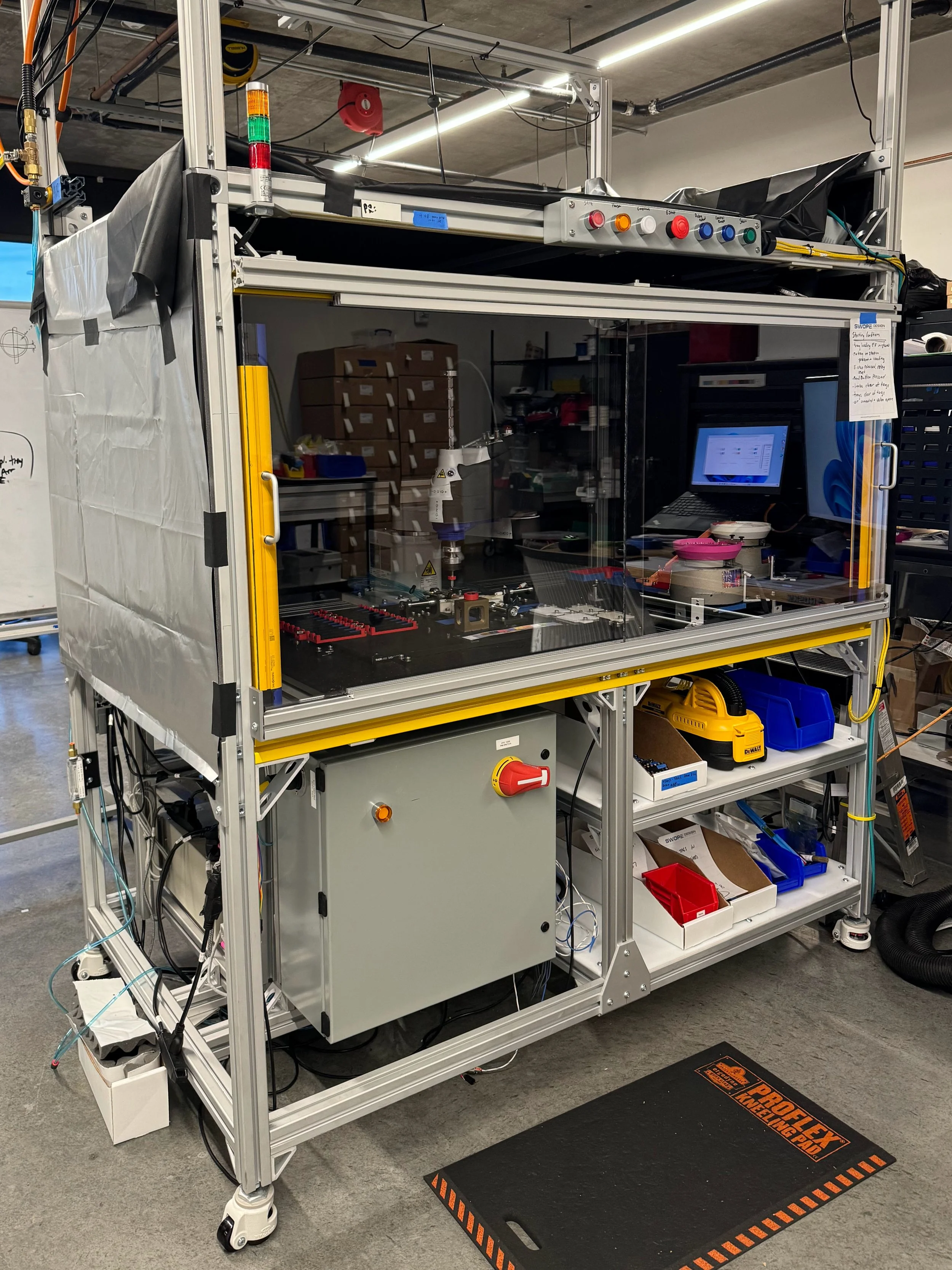
I collaborated with two other engineers to design and build an automated assembly system to scale and streamline the manufacturing process for a medical device product. My responsibilities included preliminary research, concept development, system architecture, design and build of all mechanical subsystems, system integration, bring-up, testing, training, and handoff. We built two units and made significant improvements to the original design with version two. Once the machines entered production, we worked to improve reliability, crash detection, and physical error handling.
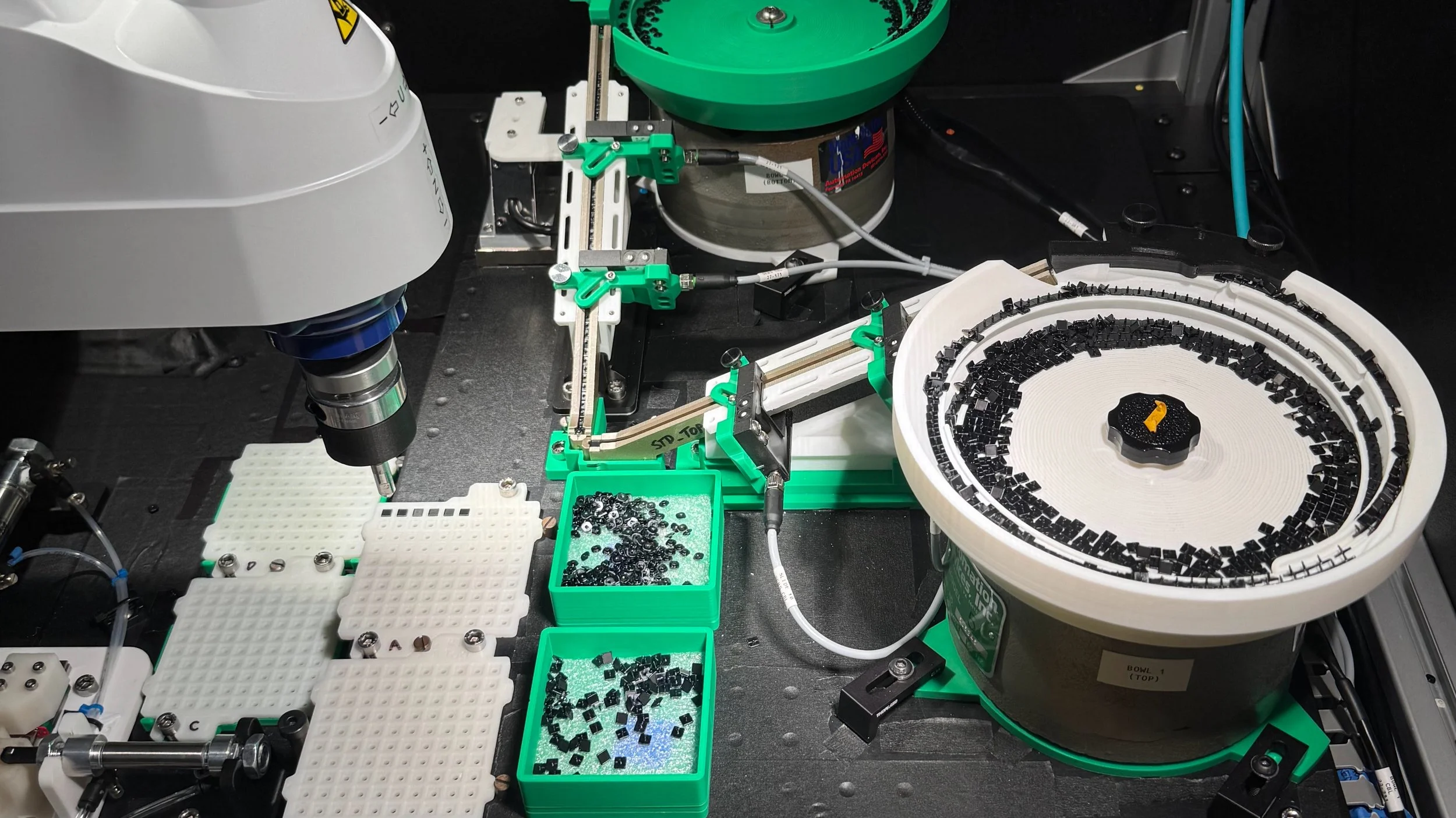
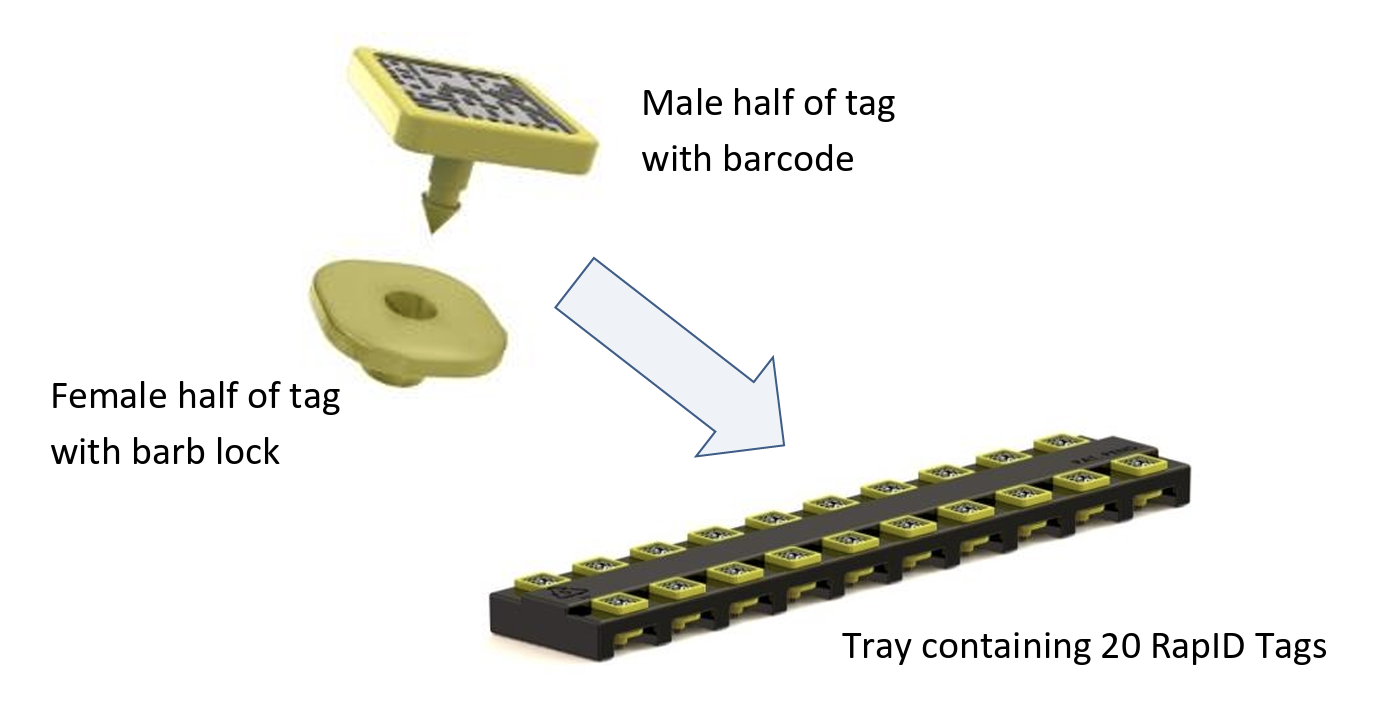
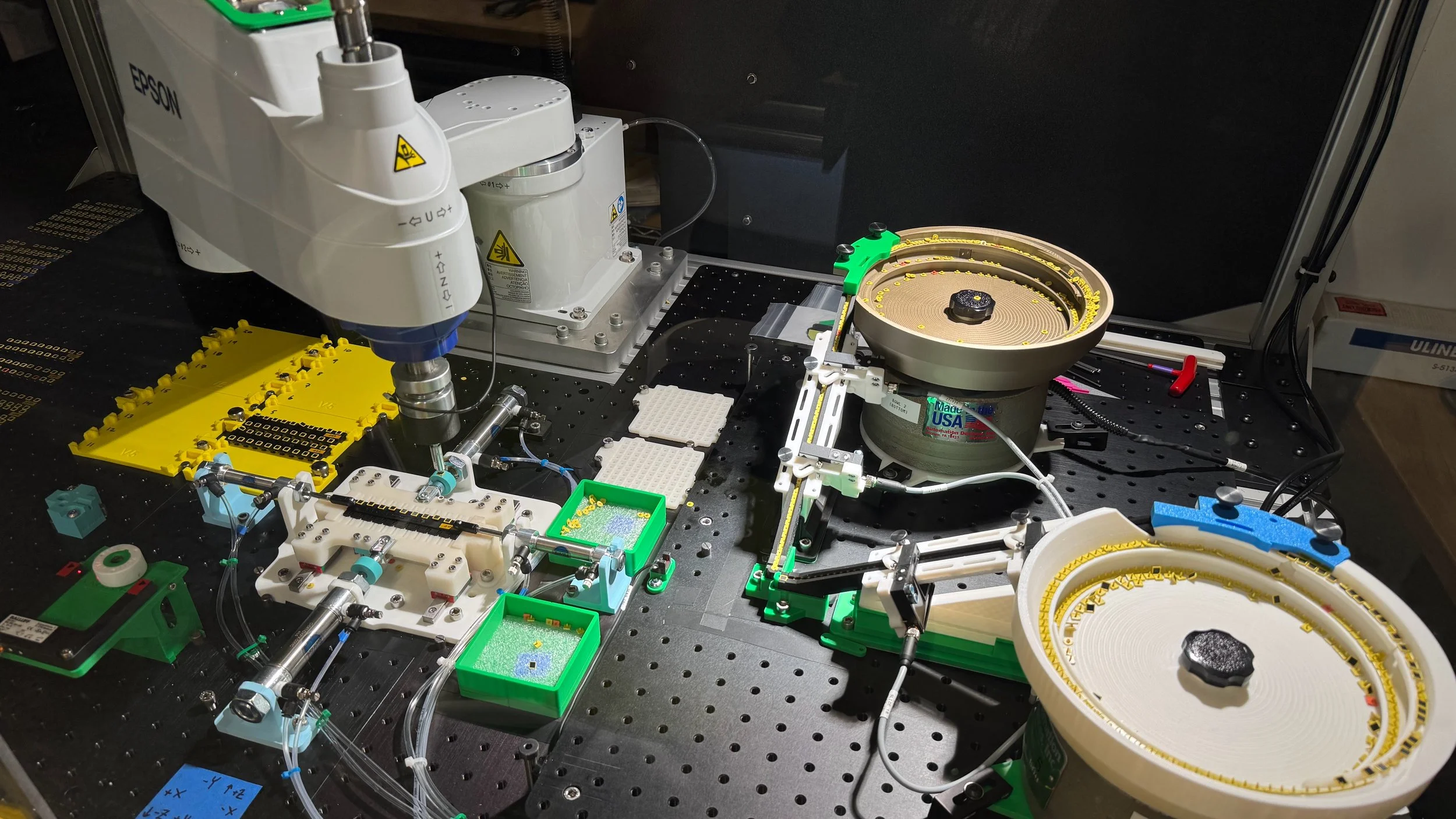
The product is composed of a carrier tray containing 20 small, multicolored tags. Each tag is either 3mm or 5mm across and includes a top (male) half and bottom (female) half, so each carrier tray contains a total of 40 parts. The tag parts must be loaded into the tray in a specific orientation, and the colors must be arranged in a specific pattern (unless parts are of a single color). A vision system identifies the color and location of tags to be loaded into the carrier tray. A high-speed SCARA robot performs the necessary pick-and-place operations, switching between end effectors as needed.
Automation workflow: Empty carrier trays are loaded into tray stages. Loose tag parts are loaded into two vibratory bowls (top tag parts in one bowl, bottom tag parts in the other). The automation program is initiated, and the bowls vibrate, causing the tag parts to tumble into the required orientation as they travel up a spiral ramp. The parts exit the bowl and slide down a ramp. As the slides fill with tag parts, the SCARA robot equips a specialized end effector and loads an empty carrier tray into the loading station. The robot switches to an end effector equipped with a tiny vacuum cup and loads bottom tag parts into the side loaders (part of the loading station). When the side loaders are full, pneumatic actuators press the bottom tag parts into the carrier tray. Top tag parts are then loaded directly into the carrier tray. When the tray is full, the robot switches end effectors, replaces the full tray with an empty one, and the process repeats until all carrier trays are full.
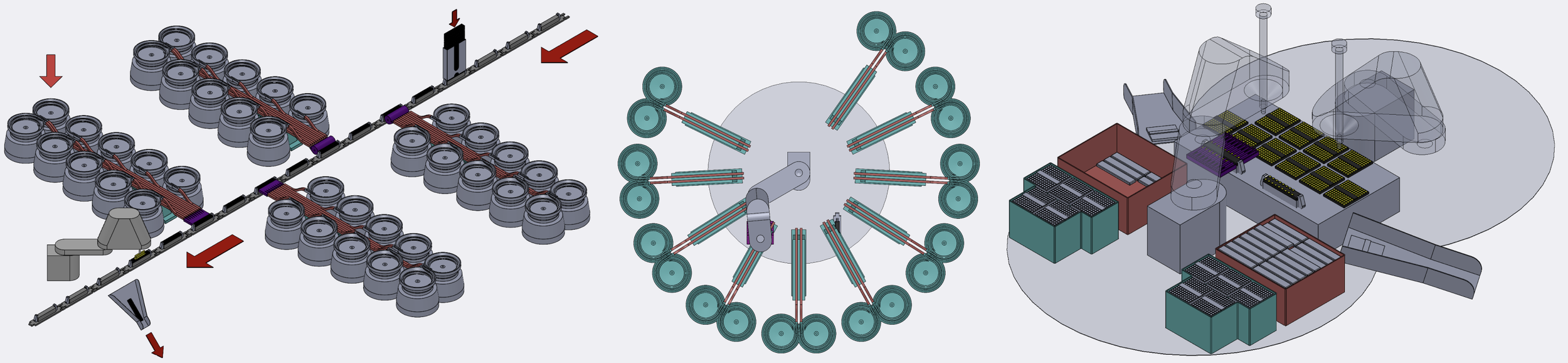
Concept Development


Robocell Version 1

Vibratory Feeding System (Bowls and Slides)

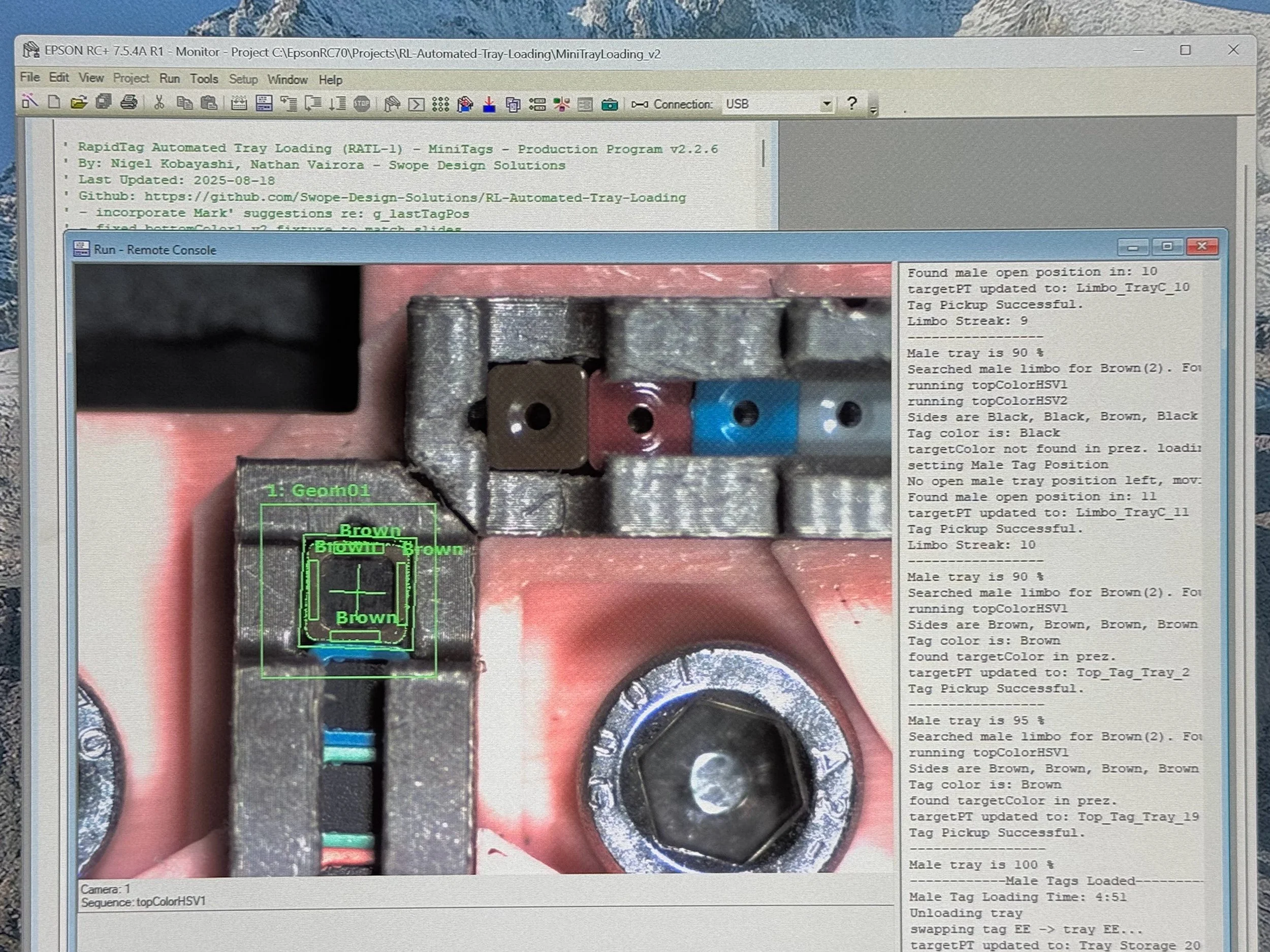
Vision System
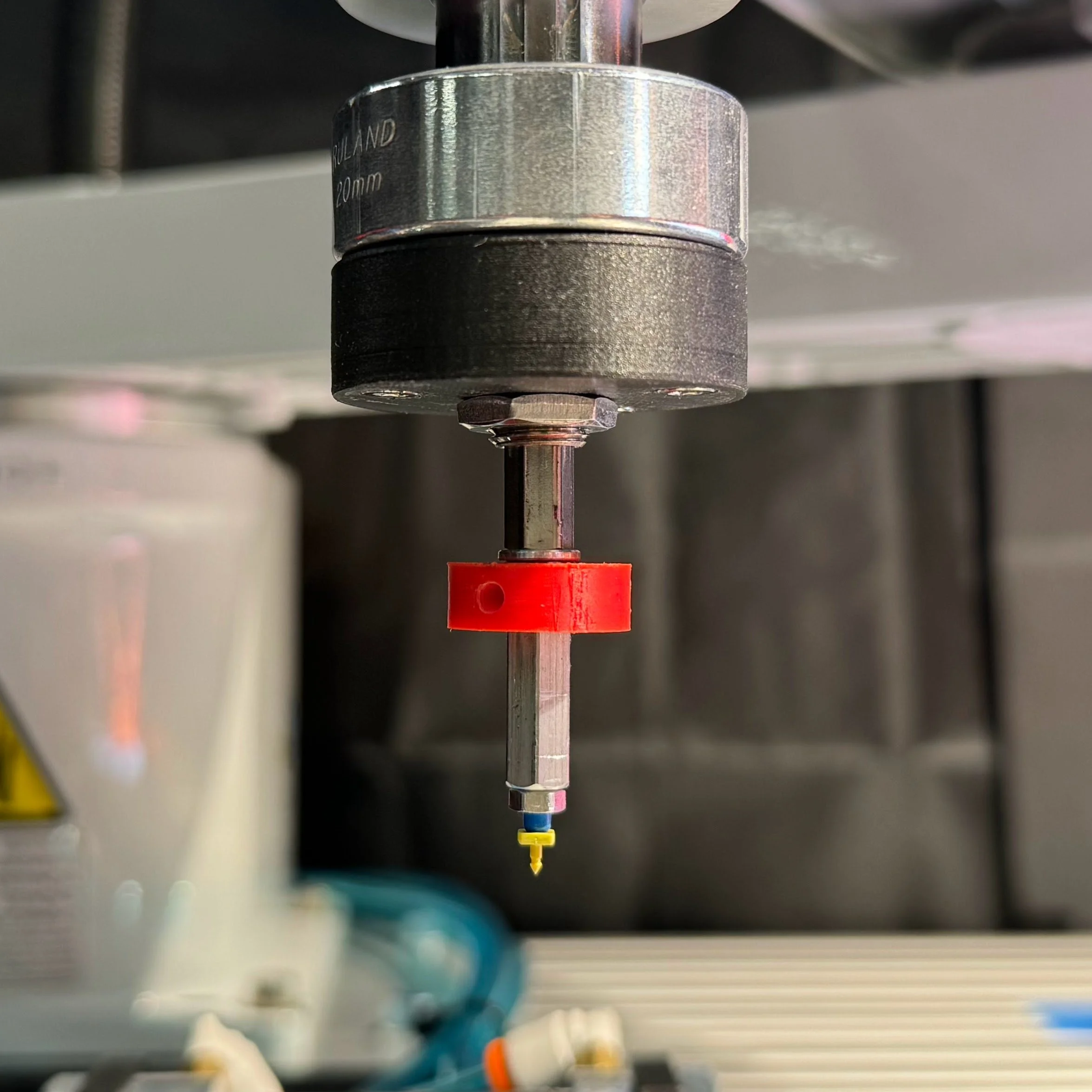
End Effectors and Tool Holder
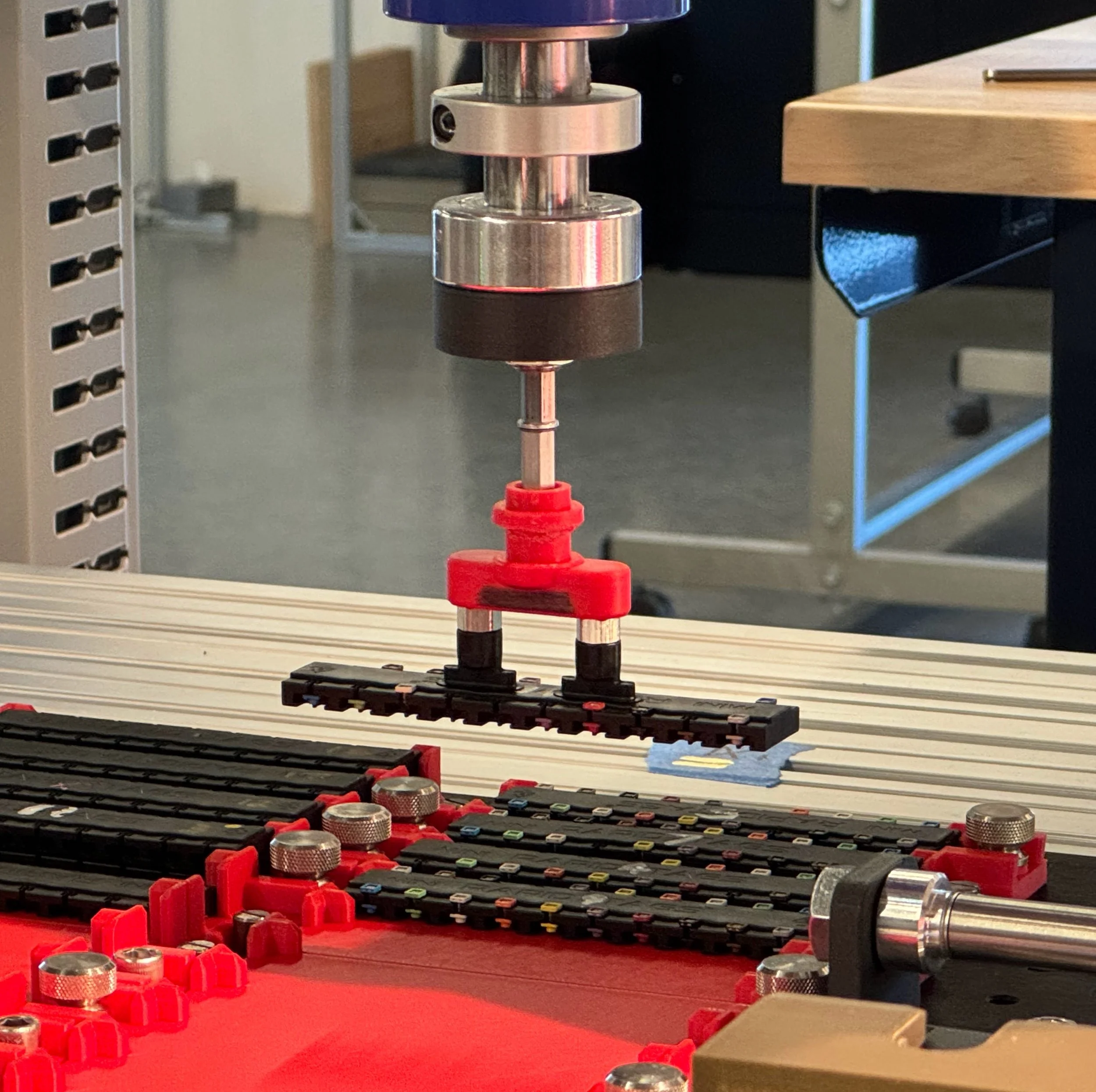
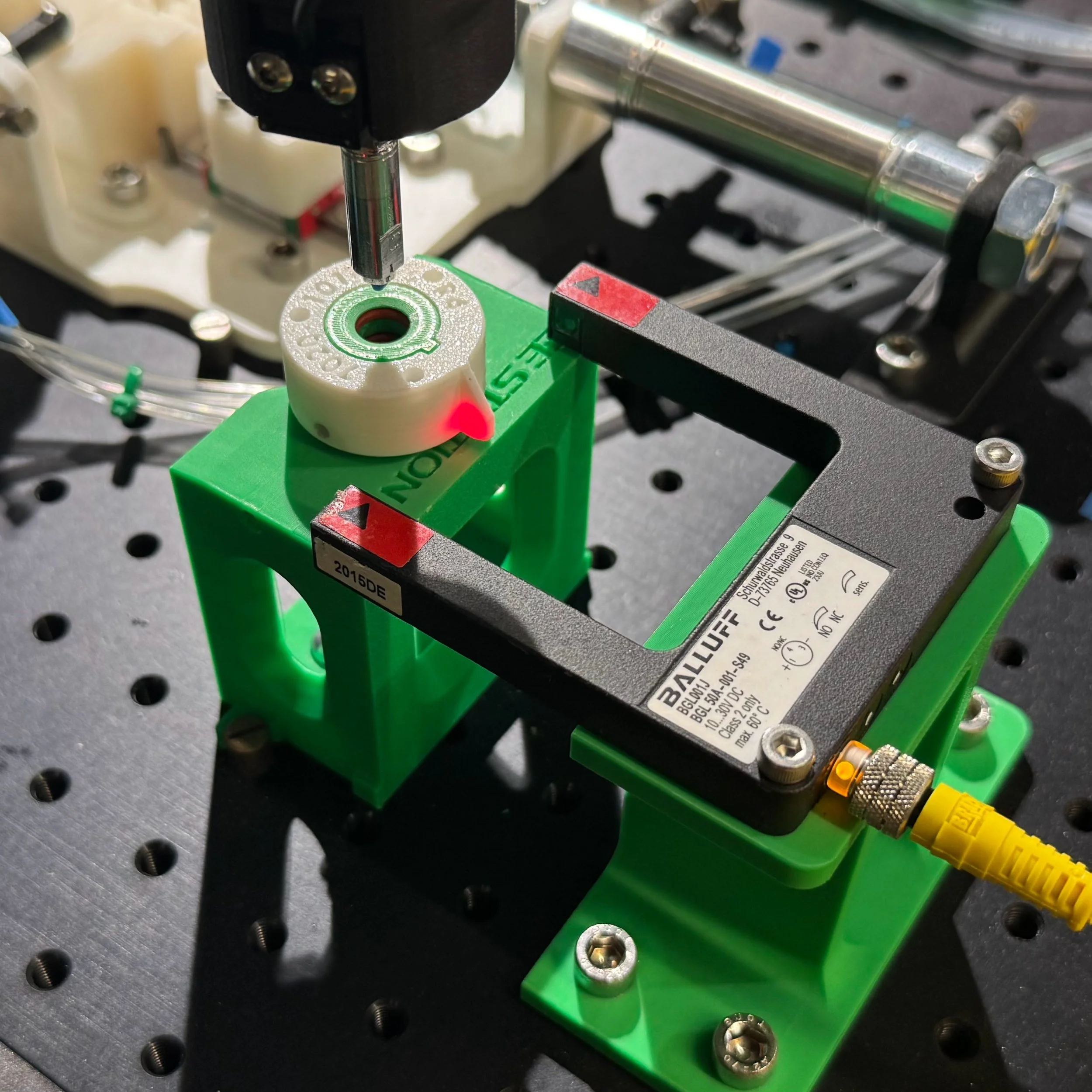
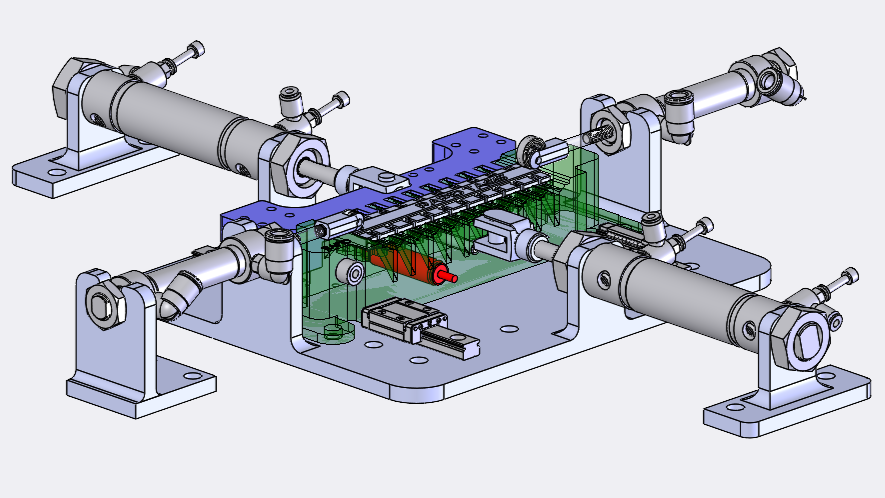
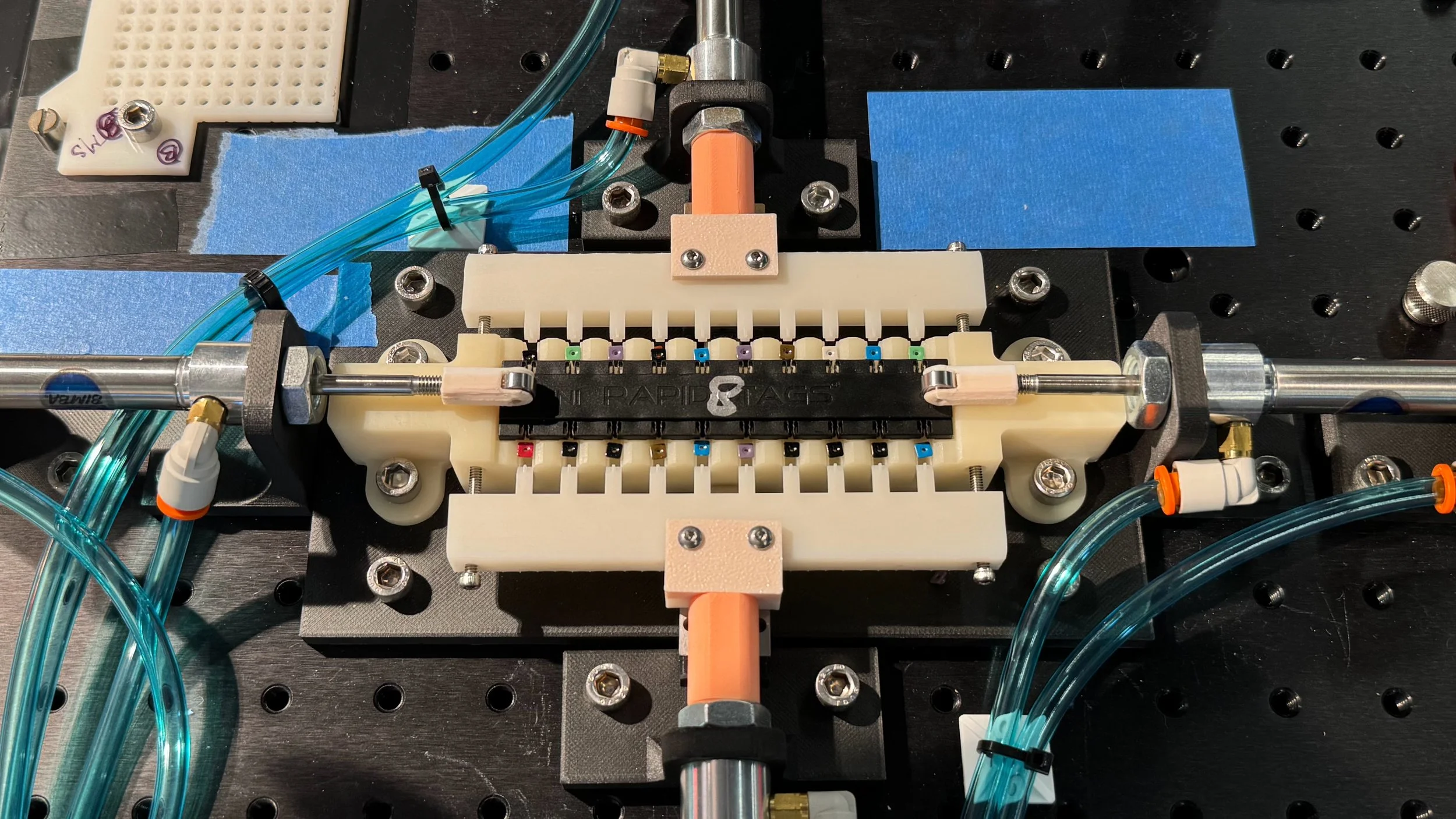
Loading Station
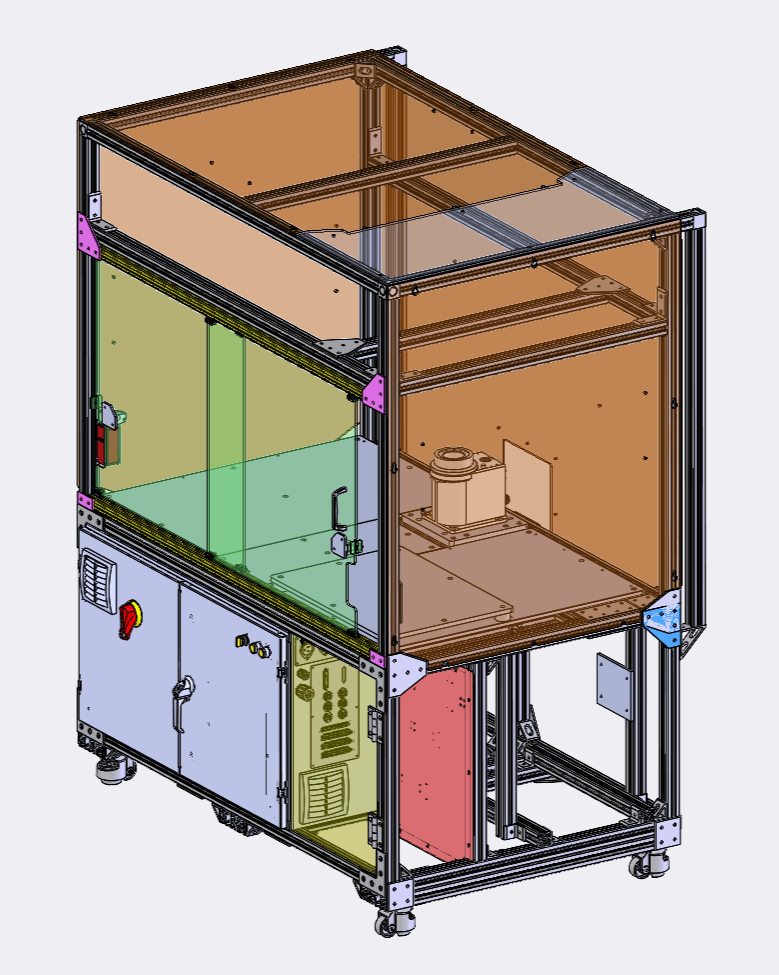

Robocell Version 2